
研究机构
由费跃农教授团队、杜建铭教授团队、黄虹宾教授团队、邓元龙教授团队、曾德怀教授团队共同组成。研究方向覆盖:无损检测、机器人运动控制、非标装备、机器视觉检测、机器人与智能装备等领域。
四轴开放式运动控制器 基于ARM和FPGA的六轴和Delta机器人控制器

基于飞行视觉的七轴智能检测机器人 基于视觉的钣金件丝印质量检测仪
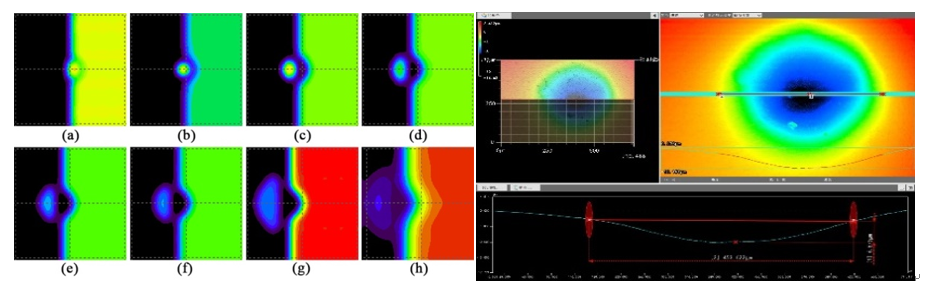
缺陷成像仿真 激光共聚焦显微镜观测缺陷
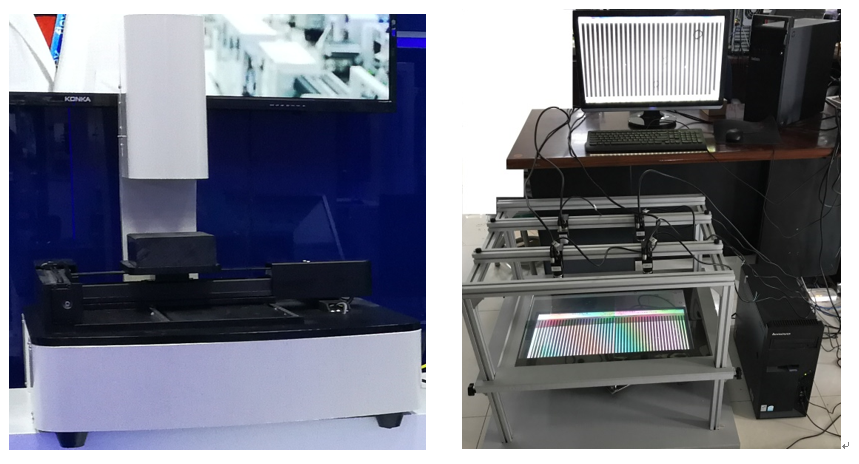
3D视觉检测仪 偏光片外观缺陷检测样机
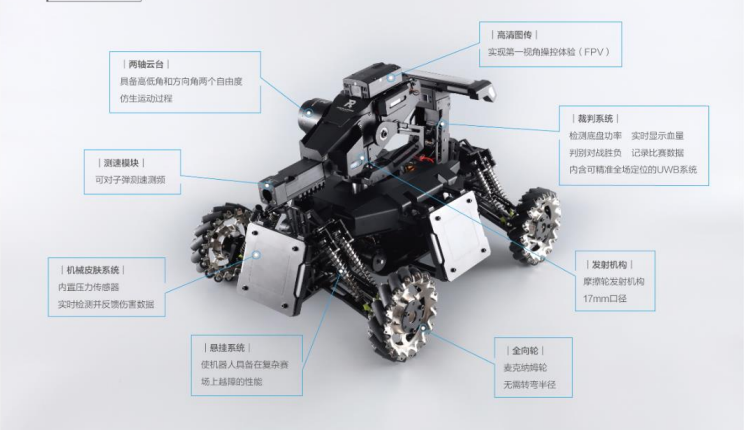
全方位移动机器人测试平台

机器人视觉识别与双目视觉定位
由费跃农教授团队、杜建铭教授团队、黄虹宾教授团队、邓元龙教授团队、曾德怀教授团队共同组成。研究方向覆盖:无损检测、机器人运动控制、非标装备、机器视觉检测、机器人与智能装备等领域。
四轴开放式运动控制器 基于ARM和FPGA的六轴和Delta机器人控制器
基于飞行视觉的七轴智能检测机器人 基于视觉的钣金件丝印质量检测仪
缺陷成像仿真 激光共聚焦显微镜观测缺陷
3D视觉检测仪 偏光片外观缺陷检测样机
全方位移动机器人测试平台
机器人视觉识别与双目视觉定位
 微信公众号
微信公众号
|
联系地址:广东省深圳市南山区深圳大学沧海校区致信楼S627室 联系电话:0755-26536224 版权所有:深圳大学机电与控制工程学院@2018-2028